impresionante vídeo de la llegada de Perseverance a Marte y estas son las cámaras que lo grabaron
Es la primera vez que tenemos imágenes –incluyendo vídeo– de esta calidad de la llegada de una de nuestras sondas a otro astro. Ni siquiera en el caso de las misiones tripuladas del programa Apolo tuvimos tanta calidad de imágenes.
Llegan cortesía de las EDLCAM de Perseverance. EDL de Entry, Descent and Landing (entrada, descenso y aterrizaje) y CAM… pues de cámaras. No son un requisito de la misión. Pero pensaron que sería bonito –a la vez que útil– disponer de ellas. La premisa fue siempre que no interfirieran en el funcionamiento del sistema de aterrizaje, ya probado con Curiosity. Así que las cámaras funcionaron de forma autónoma, almacenando las imágenes en una memoria aparte; sus datos sólo fueron copiadas a la memoria de Perseverance una vez que el rover estuvo sano y salvo en Marte.
Otra consideración fue que no resultaran demasiado caras, así que se usaron cámaras disponibles en el mercado, no cámaras diseñadas específicamente para la misión. En concreto se trata de cámaras de la gama Chameleon3 de FLIR. Apenas hubo que hacerles algunas modificaciones en el Laboratorio de Propulsión a Chorro (JPL) para sustituir algunos componentes que en el vacío emitían gases, algo que por si acaso tenía consecuencias pernicioneas no se podía permitir.
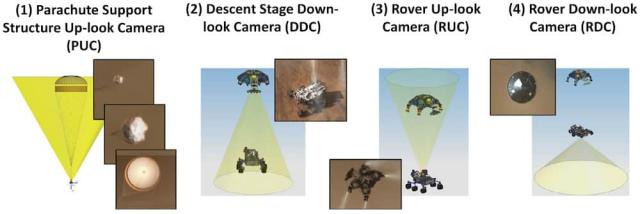
- 3 Parachute Uplook Cameras (PUC). Montadas en la cubierta trasera su misión era filmar el comportamiento del paracaídas justo desde antes de su despliegue hasta la separación de la cubierta. Ayudaron a ver el «huevo de pascua» que escondía el paracaídas.
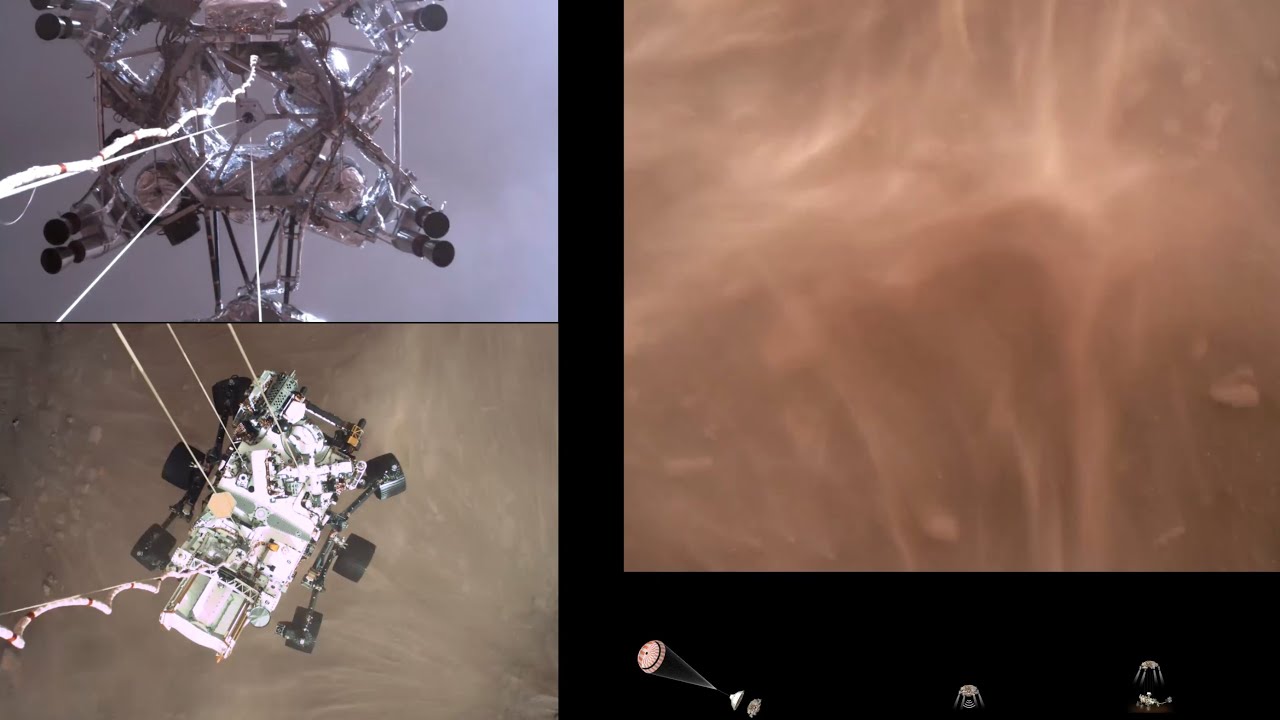
- 1 Descent Downlook Camera (DDC). Montada en la parte inferior el módulo de descenso apuntando hacia Perseverance. Para observar el comportamiento del rover bajo la grúa aéra y el efecto del escape de los motores en el suelo.
- 1 Rover Uplook Camera (RUC). Montada en la parte superior de Perseverance apuntando hacia arriba para enfocar a la grúa aérea. Para ver su comportamiento en vuelo y su marcha tras haber depositado a Perseverance en la superficie.
- 1 Rover Downlook Camera (RDC). Montada en la parte inferior de Perseverance mirando hacia el suelo. Para no perderse detalle del descenso desde la separación del escudo térmico hasta el aterrizaje.
Una de las PUC dejó de funcionar en el momento en el que se disparó el mortero que liberó el paracaídas. Pero como eso ya había sucedido en los ensayos en tierra, así que por eso iban tres cámaras en esa posición. Las cámaras que se ocupaban de las otras tres posiciones funcionaron a la perfección.
El sistema EDLCAM también llevaba un micrófono montado en el exterior del cuerpo del rover para grabar los sonidos del descenso. Pero aunque el micrófono en sí funcionó hubo un fallo en el sistema que tenía que haber digitalizado el sonido para luego pasarlo a la memoria de Perseverance. Así que no se grabaron los sonidos. Sin embargo, una vez en tierra, lo volvieron a activar y ya pudo grabar el sonido del viento en Marte. También es la primera vez que escuchamos de verdad otro planeta y no mediante sonificaciones de datos. Se corresponde a una ráfaga de viento de unos 5 metros/segundo. Era la tercera vez que intentábamos poner un micrófono en Marte.
Durante el fin de semana Perseverance también desplegó su «cabeza»,
con lo que las cámaras de navegación (NAVCAMs) pudieron empezar también a
capturar imágenes. Con ellas se ha construido este primer panorama, aunque aún falta terminar de calibrar las cámaras y el proceso de ensamblado de las imágenes; por eso se ven algunos cortes:
Están descritas con todo lujo de detalles en The Mars 2020 Engineering Cameras and Microphone on the Perseverance Rover: A Next-Generation Imaging System for Mars Exploration.
Y luego están la Mastcam–Z y la SuperCam, pero ya hablaremos de ellas otro día por no alargar más esta anotación.
Las imágenes que van llegando a Tierra se pueden ver en tiempo real y sin procesamiento alguno en Raw Images; hay además un bot que las va sacando en Twitter diligentemente para no tener ni que estar pendientes, @PersevereImgBot.
FUENTE: https://www.microsiervos.com